Affordance-Based Interactive Navigation Among Movable Obstacles
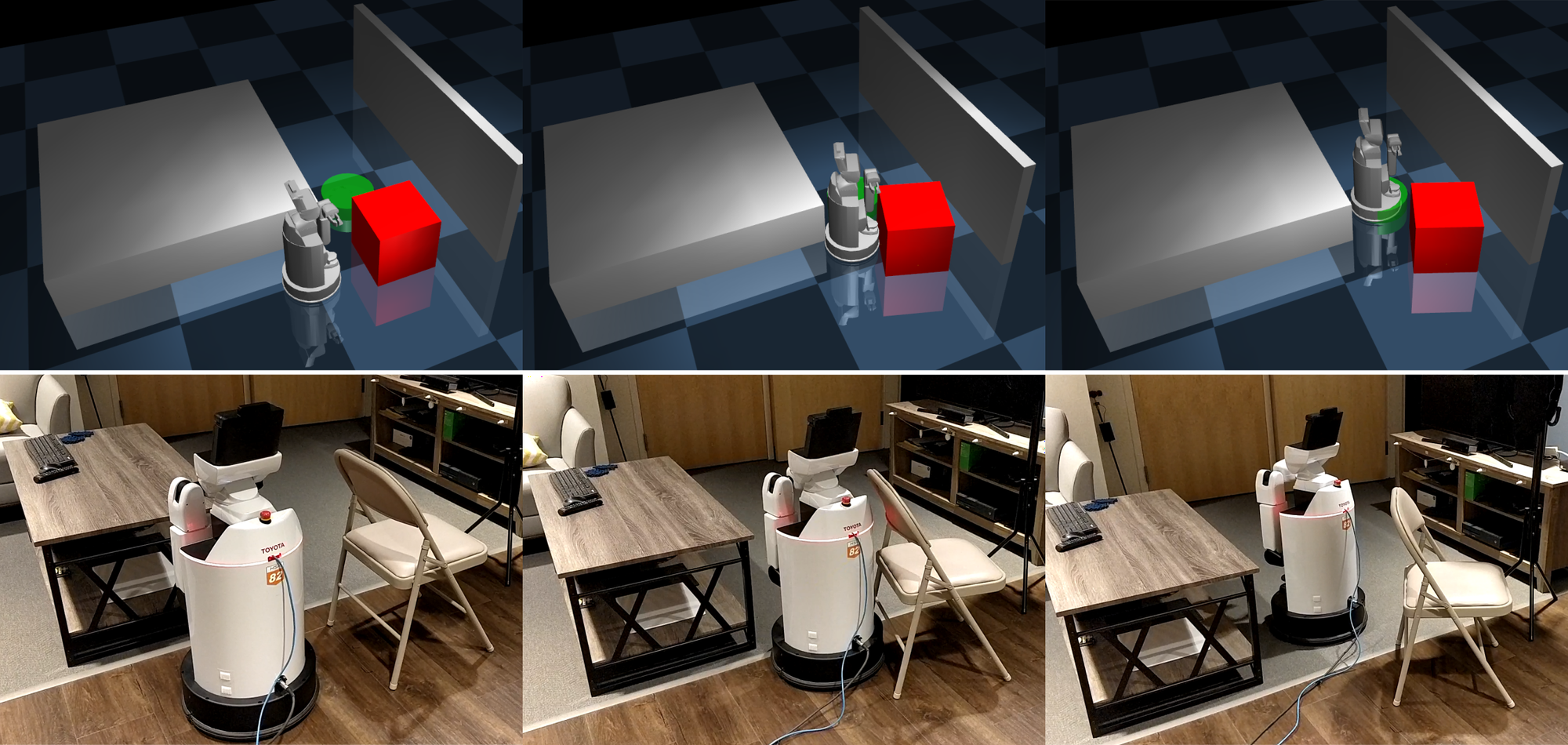
In this project, we proposed a navigation and manipulation algorithm based on the concept of affordance and trajectory optimization method, that will enable a mobile manipulator to remove unexpected obstacles on the way to destination and have the capability to decide whether to pick or push items.